HomeBrew Robotics Club is a monthly meeting of a group of people with a expertise in robotics in Silicon Valley. I've been wanting to join for a while, although I have not created a robot myself yet... and last week I finally made it! Took lots of pictures so sharing some of them here:
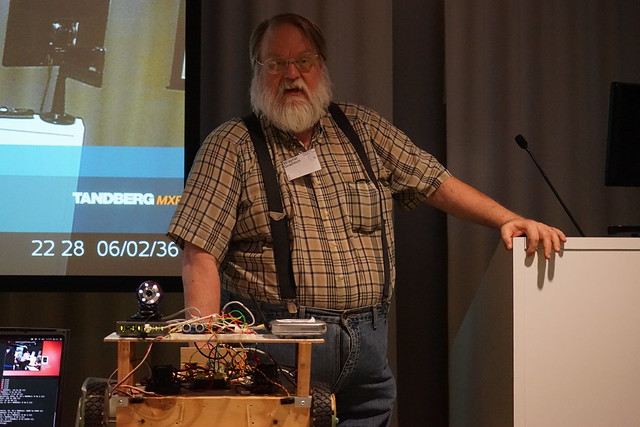
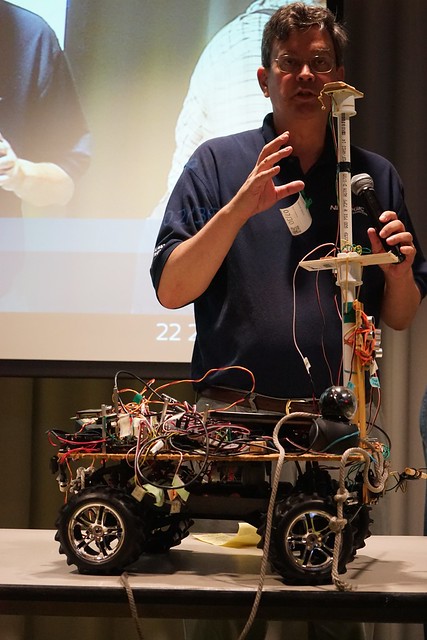
First, we had people showcase their "homebrew" robots.
Camera of the robot capturing me taking a picture of the robot :)

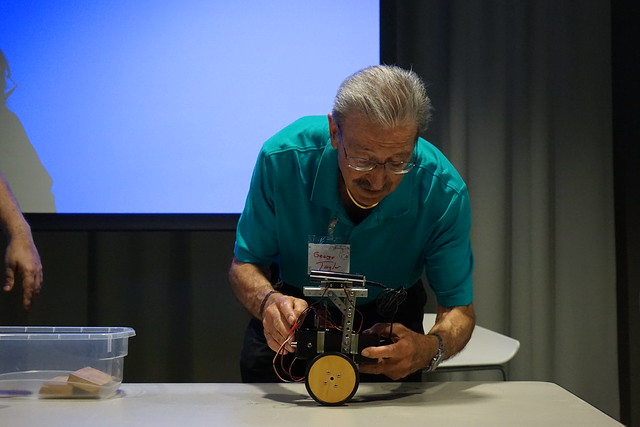
This one is balancing robot. (Balancing is hard!)

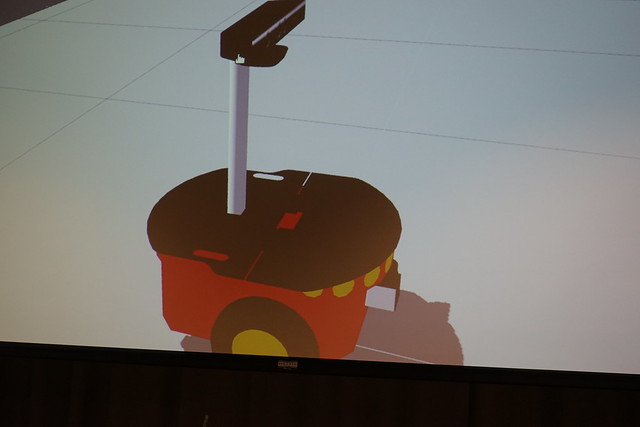
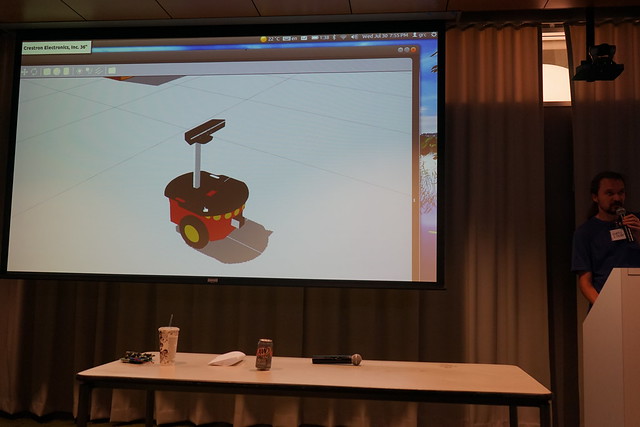
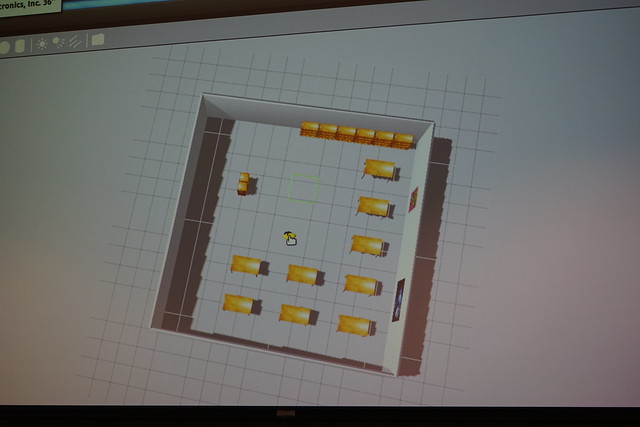
For this robot, the maker used Kinect, and simulated the robot and the room and obstacles etc.
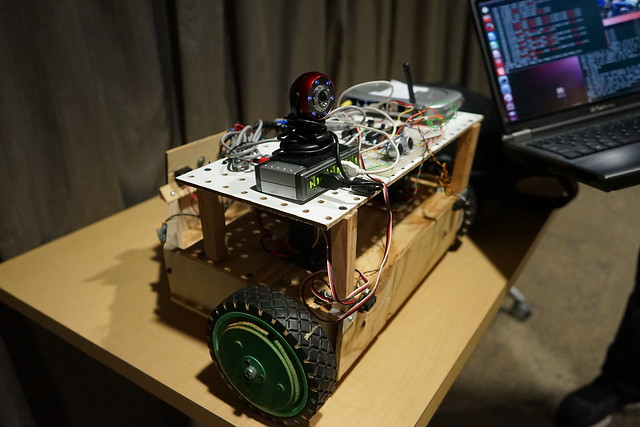
This robot won a recent robot race!
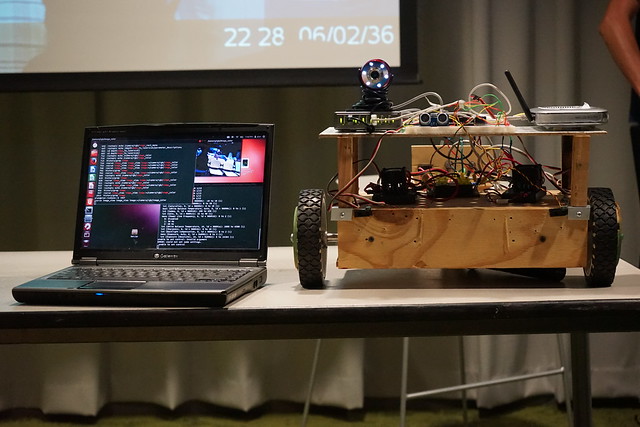
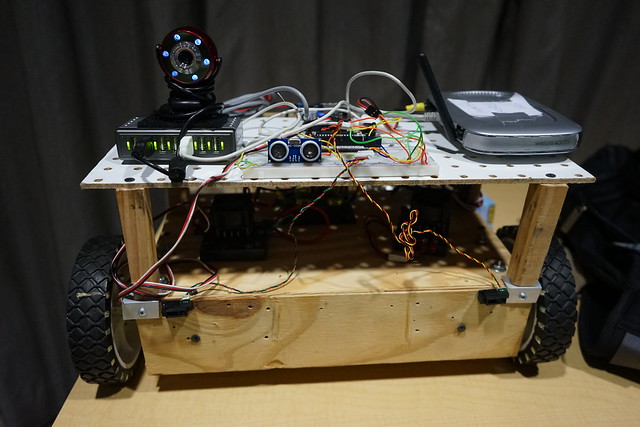
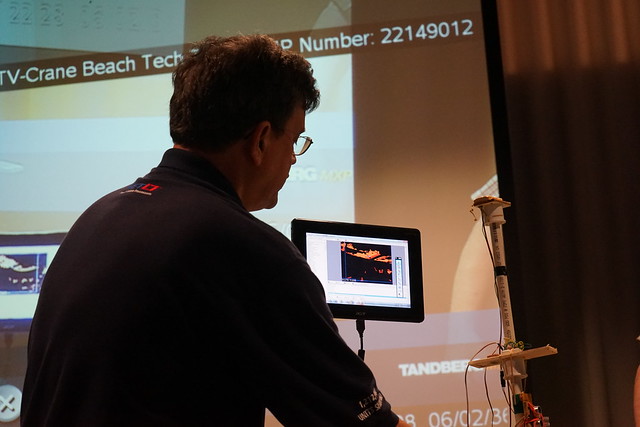
You can capture the environment using the camera.

And the robot will learn about the obstacles or cones for the race.
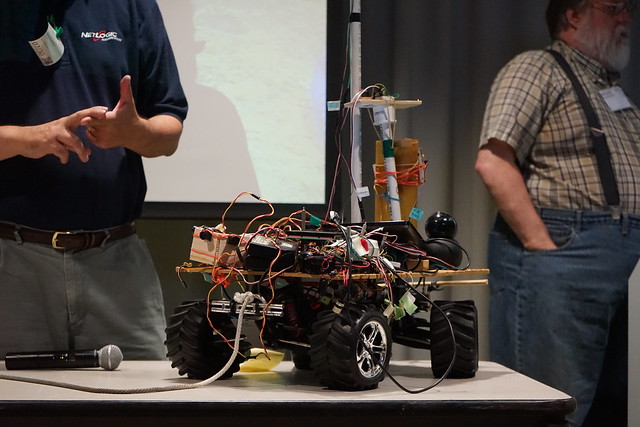
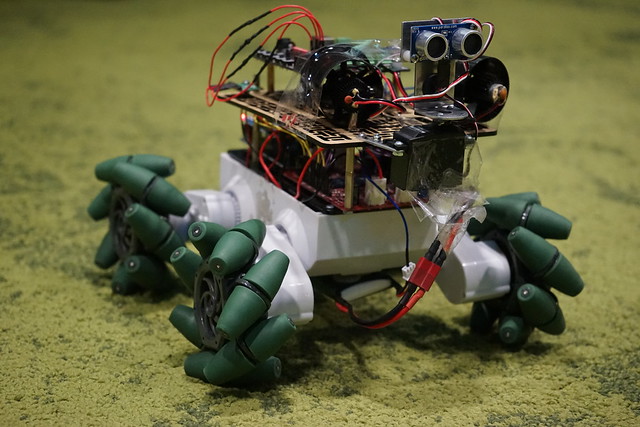
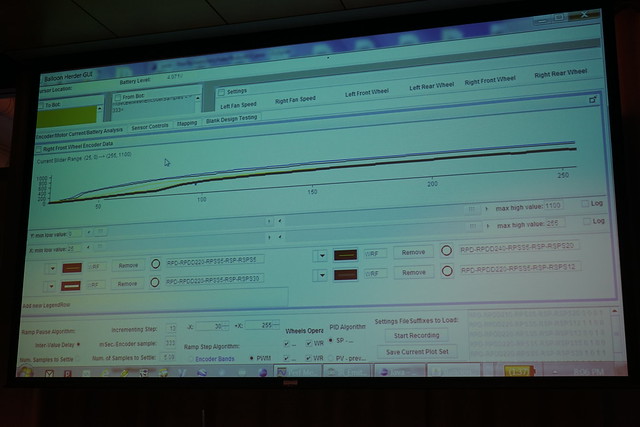
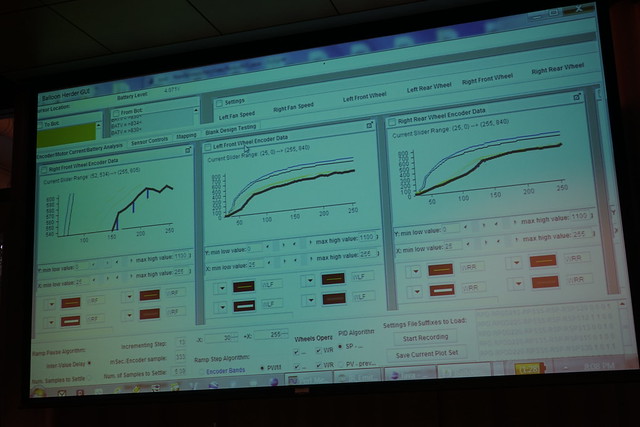
This robot had a unique tire shape, and can run in different directions, and interface to track the activities of the robot.
This one was using ROS (Robot Operating System) and Turtlebot, and follows where you go like a pet. Cute!

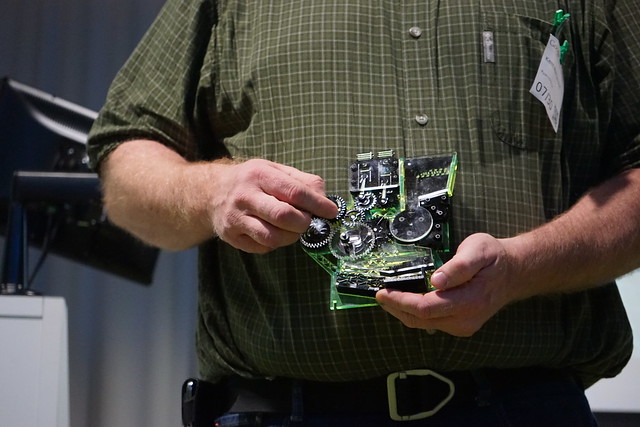
This is a robot that you can put M&M's. Lots of gears, and love for gears!
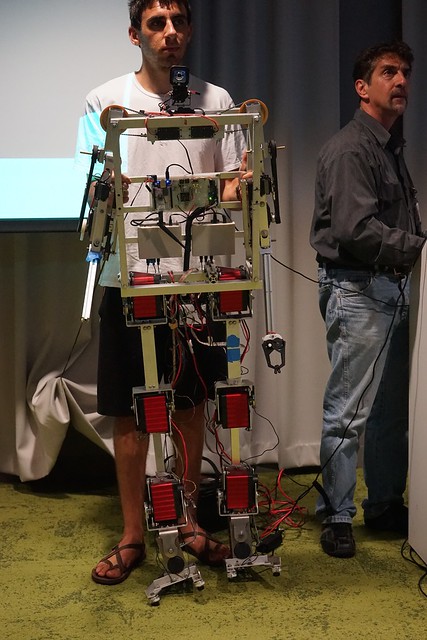
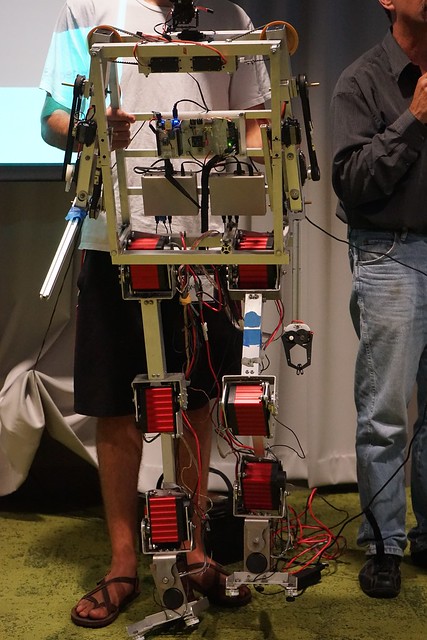
This robot is one of the teams that is finalist at Darpa Robotics Challenge. Whereas other teams are investing a million dollars for their robots, this team is fighting against them with a robot made with 10,000 dollars.
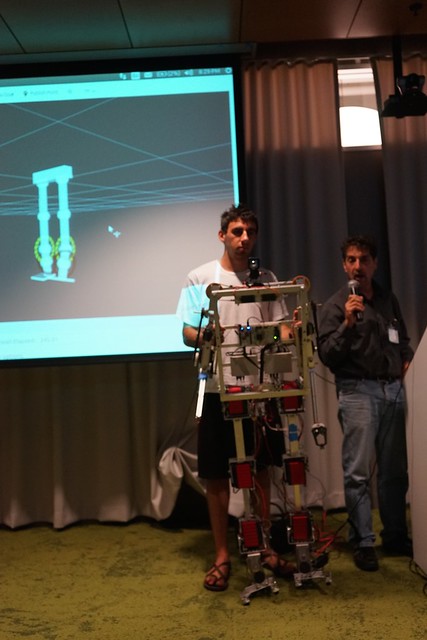
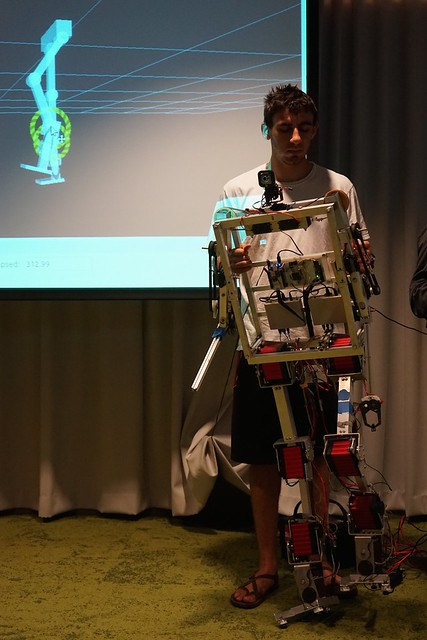
When you change the leg position with your computer, the robot will change its leg position.
One of the attendees talked about his project flying a rocket created by kids, using Android and Arduino, etc. (It will be illegal in US, but it is not in New Zealand where he lives... ) I heard it will be documented here, should be fun!
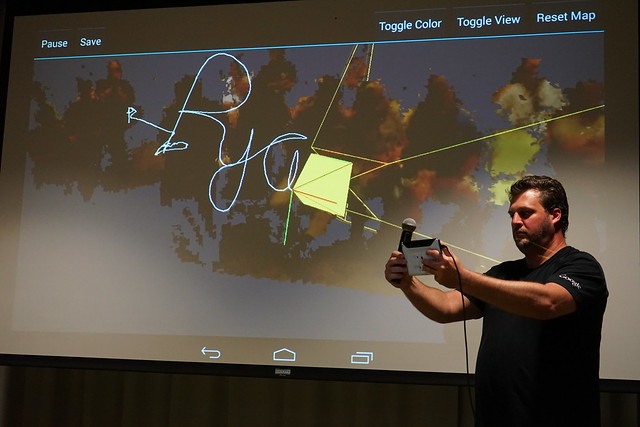
The main presentation was Project Tango, by Ryan Hickman at Google ATAP team.
This was a no slide - demo only session with the Tango device :)

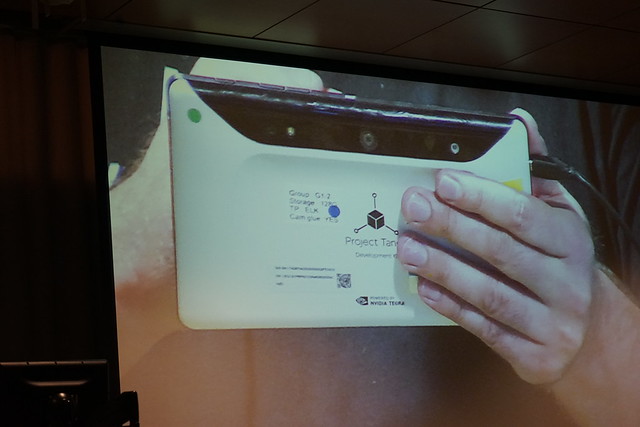
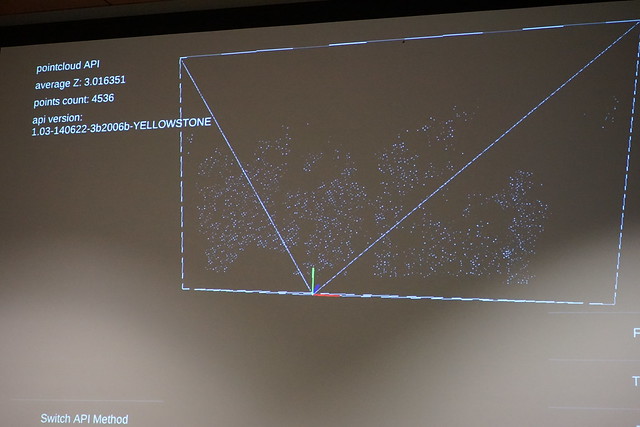
Tango device capturing the room environment (and us in the audience).

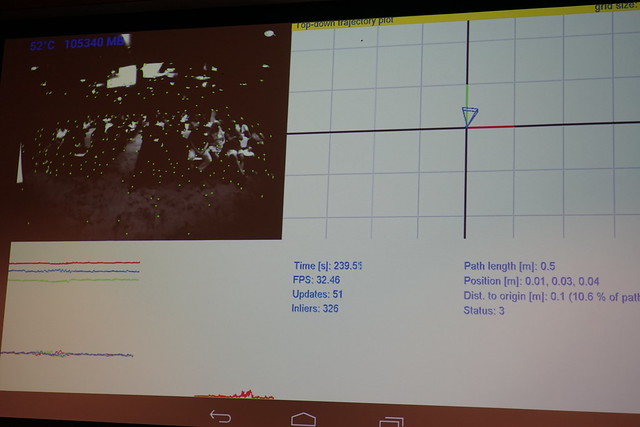
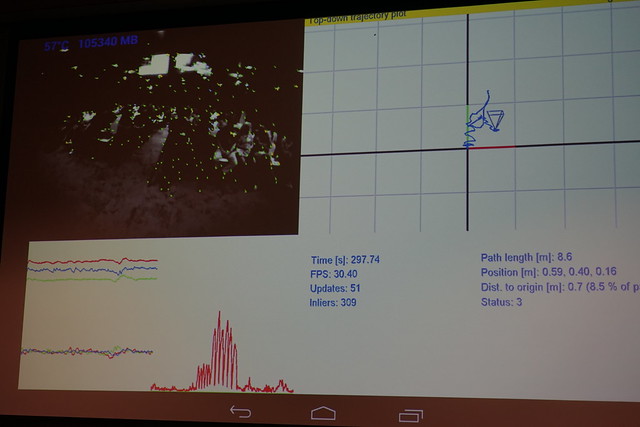
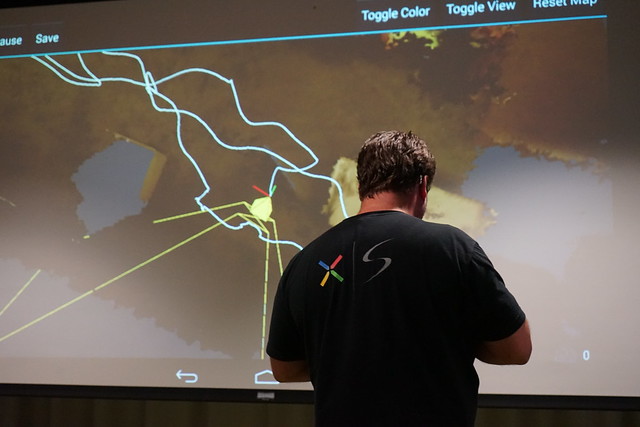
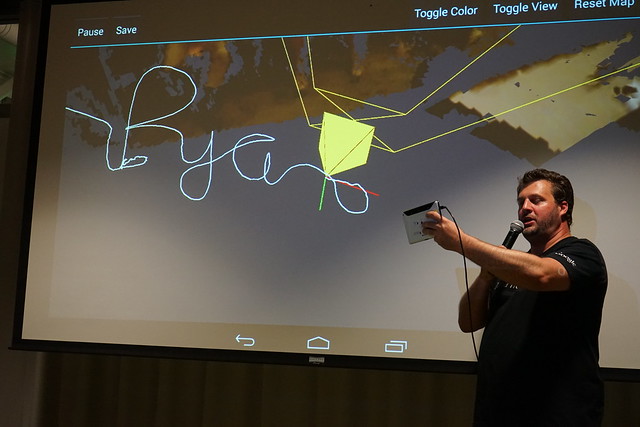
The red dots are trying to verify if there was changes from last time it scanned.



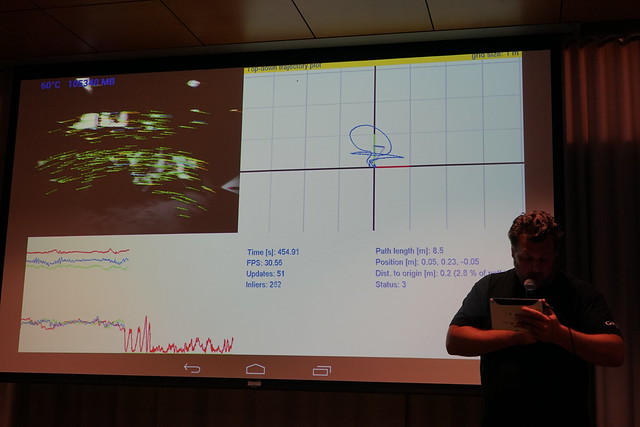
Drawing letters in the air.
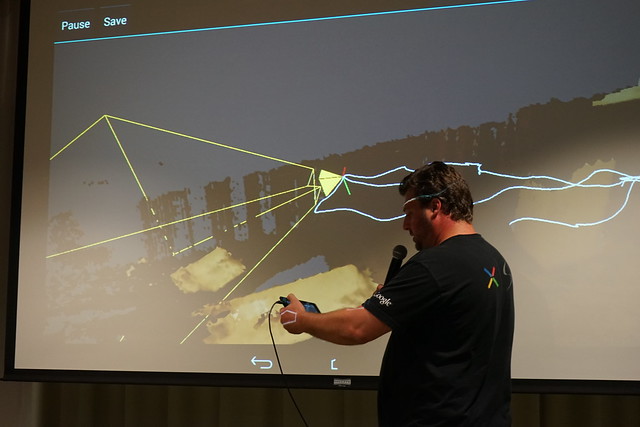
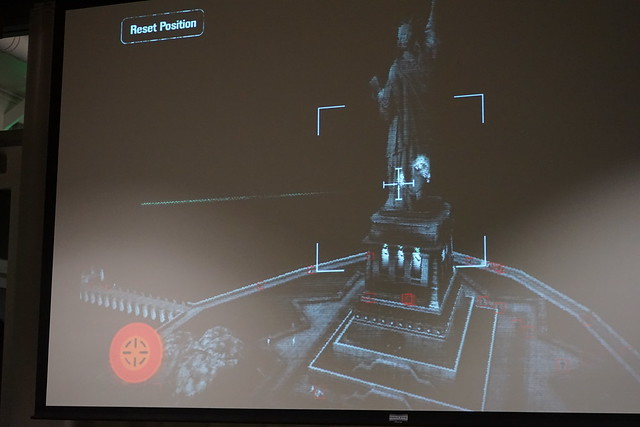
Now we go into a virtual game world and get inside that world using Tango device, and record the track.




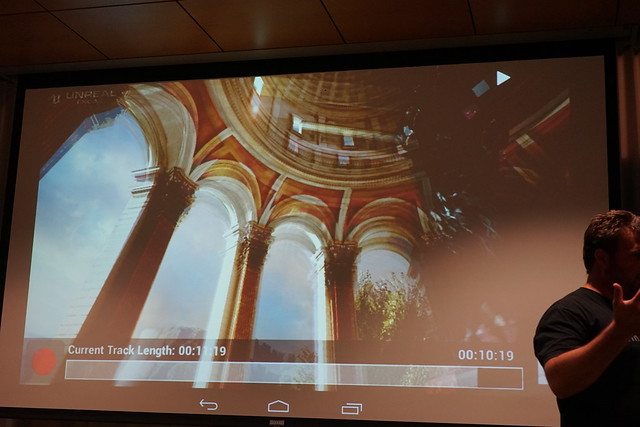
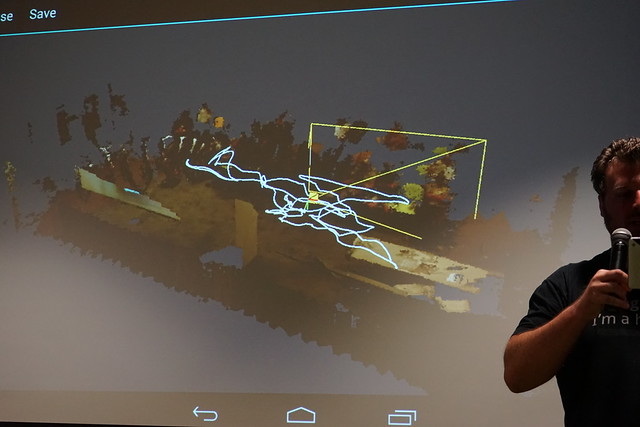
We can go into a room and look at interiors.



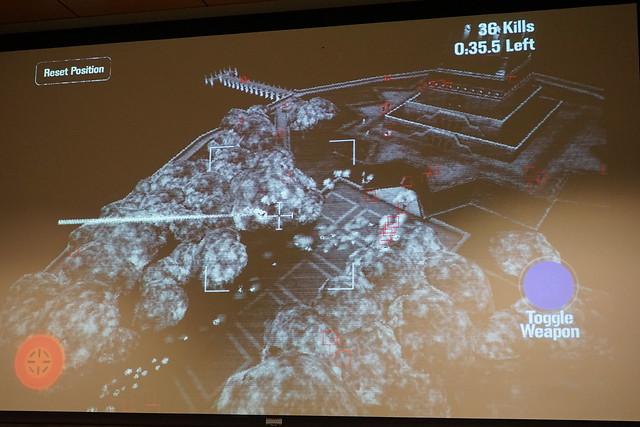
Now we're in a real game fighting zombies.
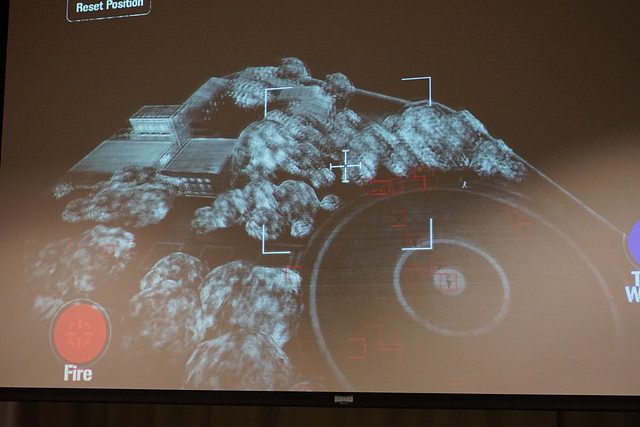
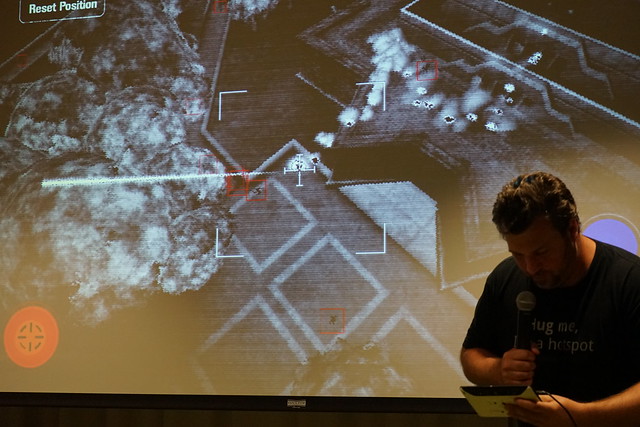
Your location matters, so if you physically go lower you can shoot the target from down below.




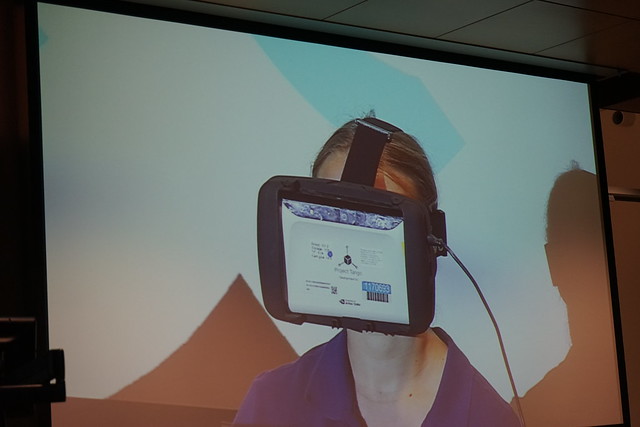
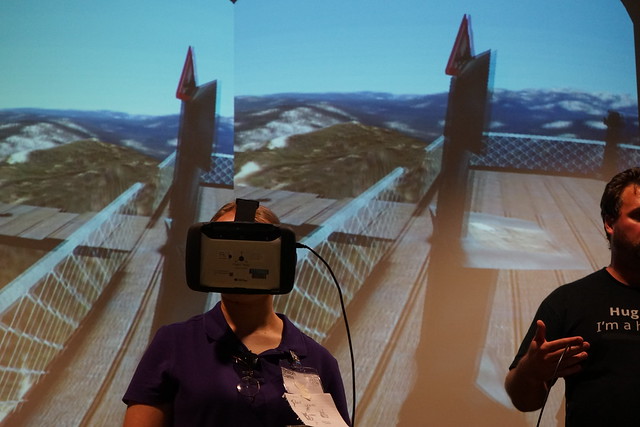
You can wear Tango device (like Oculus Rift) and experience the games.



Thanks to Shiloh for volunteering to help :)

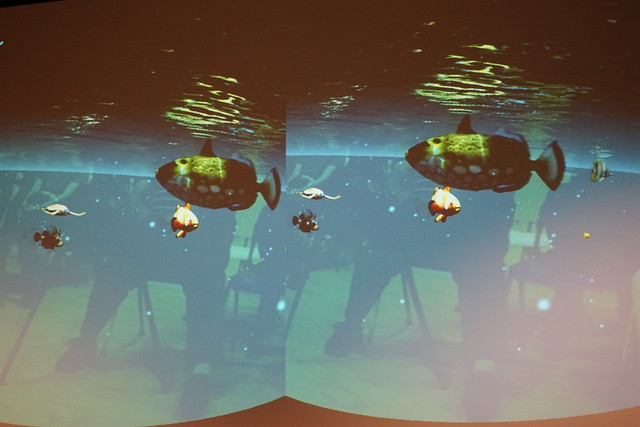
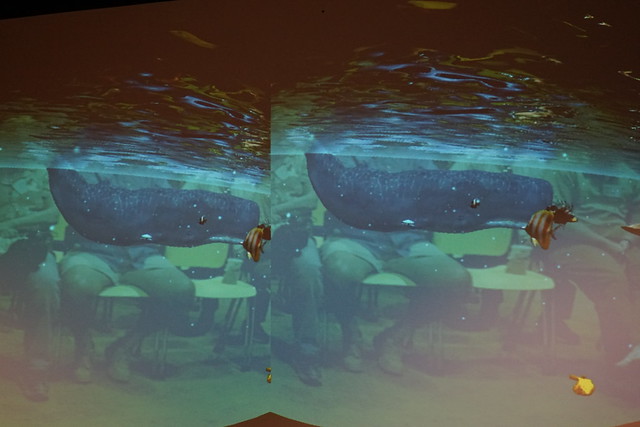
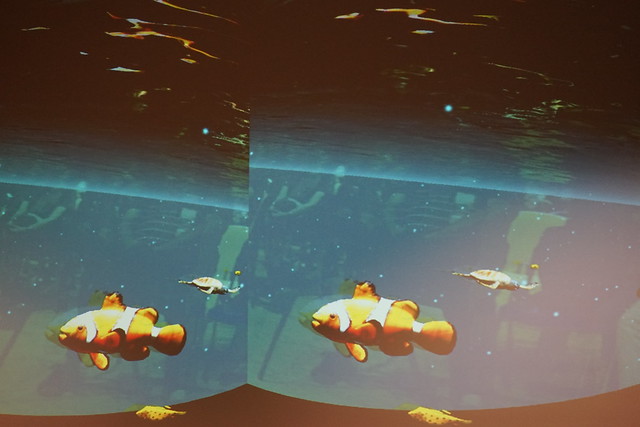
In this demo, the user is seeing underwater world overlaid with the real world (so us in the audience are down in the water...)


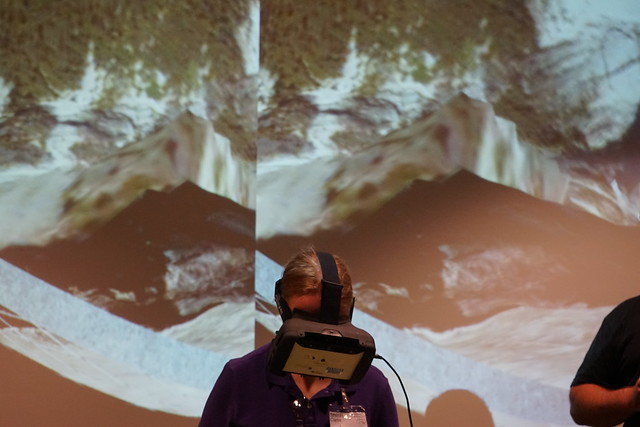
The next demo is with landscape and not overlaying the real world. You can walk around inside this world...




"Don't step forward, there is a cliff and you will fall!"
"Oh, I'd love to try falling off the cliff...."
That was fun! Thank you to the organizers, presenters and everyone!
Update 1/24/2015
Tango and NASA collaboration... so awesome!
Disclaimer: The opinions expressed here are my own, and do not reflect those of my employer. -Fumi Yamazaki
First, we had people showcase their "homebrew" robots.
Camera of the robot capturing me taking a picture of the robot :)
This one is balancing robot. (Balancing is hard!)
For this robot, the maker used Kinect, and simulated the robot and the room and obstacles etc.
This robot won a recent robot race!
You can capture the environment using the camera.
And the robot will learn about the obstacles or cones for the race.
This robot had a unique tire shape, and can run in different directions, and interface to track the activities of the robot.
This one was using ROS (Robot Operating System) and Turtlebot, and follows where you go like a pet. Cute!
This is a robot that you can put M&M's. Lots of gears, and love for gears!
This robot is one of the teams that is finalist at Darpa Robotics Challenge. Whereas other teams are investing a million dollars for their robots, this team is fighting against them with a robot made with 10,000 dollars.
When you change the leg position with your computer, the robot will change its leg position.
One of the attendees talked about his project flying a rocket created by kids, using Android and Arduino, etc. (It will be illegal in US, but it is not in New Zealand where he lives... ) I heard it will be documented here, should be fun!
The main presentation was Project Tango, by Ryan Hickman at Google ATAP team.
This was a no slide - demo only session with the Tango device :)
Tango device capturing the room environment (and us in the audience).
The red dots are trying to verify if there was changes from last time it scanned.
Drawing letters in the air.
Now we go into a virtual game world and get inside that world using Tango device, and record the track.
We can go into a room and look at interiors.
Now we're in a real game fighting zombies.
Your location matters, so if you physically go lower you can shoot the target from down below.
You can wear Tango device (like Oculus Rift) and experience the games.
Thanks to Shiloh for volunteering to help :)
In this demo, the user is seeing underwater world overlaid with the real world (so us in the audience are down in the water...)
The next demo is with landscape and not overlaying the real world. You can walk around inside this world...
"Don't step forward, there is a cliff and you will fall!"
"Oh, I'd love to try falling off the cliff...."
That was fun! Thank you to the organizers, presenters and everyone!
Update 1/24/2015
Tango and NASA collaboration... so awesome!
Disclaimer: The opinions expressed here are my own, and do not reflect those of my employer. -Fumi Yamazaki
0 件のコメント:
コメントを投稿